|
Durante cuatro años un equipo de investigación en arqueológia subacuatica se ha sumergido en un sector del atlantico sur para explorar restos de naufragios. El campo de investigación es la Isla de Lobos, una masa de granito frente a la costa de la ciudad de Punta Este, Uruguay. Durante casi 400 años, muchas naves han naufragado debido a los frecuentes temporales y bancos de niebla. La gran cantidad de restos de naufragios y la fuerte corriente submarina vuelve muy peligrosa las actividades de investigación. Por consiguiente, hemos adoptado la tecnología ROV para el explorar el fondo del mar. En general, la arqueología subacuática en América del sur ofrece poca evidencia del uso de tecnología ROV, aunque nuestro criterio es utilizar esta tecnología de modo discreto y complementario. La arqueología de naufragios, ha enfocado entre otras cosas, la recuperación de elementos históricos y carga útil. El Proyecto de la Isla de Lobos, por otro lado, ha enfocado más el análisis técnico y metodológico, específicamente en determinar las diferencias espacio-temporales entre los naufragios en los ambientes de la isla condicionado por las fluctuaciones de las mareas y la meteorología.
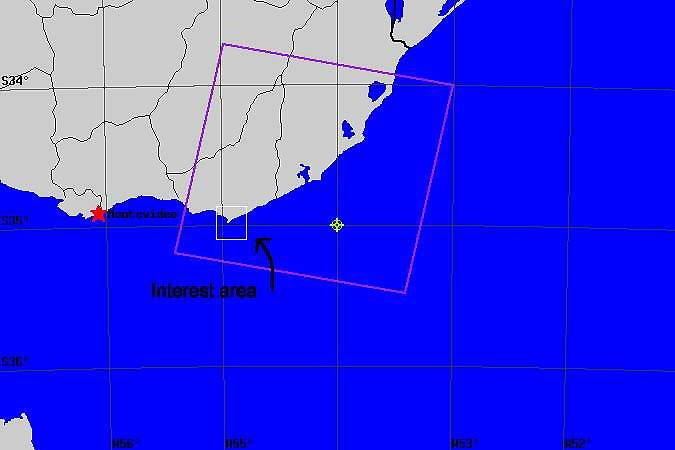
Fig 1: Isla de Lobos, Uruguay El área de estudioIsla de Lobos se sitúa en el nordeste de la Ciudad de Punta del Este en Uruguay, América del Sur (Figura 1). Fue escogida como área de estudio porque se ubica en una área que enfrenta al océano relativamente no disturbada arqueológicamente debido a su difícil acceso.
Fig 2: El magnetometro Geometrics G-800 a bordo MetodologíaPara testear bien la interacción entre los naufragios hemos usamos un marco conceptual que cambia modos de observación y análisis. En primer lugar reconstruimos el rumbo antiguo de la nave en base a la documentación antigua. Sobre este diagrama utilizamos un magnetómetro de alta definición Geometrics G-800 con una sensibilidad de 0.002 nT de muestra por segundo, detectando restos férreos con valores en algunas áreas de investigación entre 10 a 56 tonelada métrica.. Este instrumento trabaja con un software hidrográfico especial Turbo Sodena 2000. Para identificar los principales puntos de coordenadas geográficas usamos un DGPS Valsat 2008 M2 conectado por radio (VHF 459 mhz). La segunda fase de la investigación que es la exploración con el uso del ROV un Phantom P-300 (Figura 2). Este ROV trabajan a 100 metros profundidad con el thruster horizontal a 2 y los thruster verticales a 1. Tiene ligth 2x150.
Fig 3: Phantom ROV P-300 El ROV ha reemplazado en más de una ocasión a los buzos y se ha convertido en una de herramienta principal de investigación. En la Isla de Lobos, los ROV trabajan entre 8 a 15 metros profundidad equipado con una cámara video digital Simrad OE tipo 1367 Color Autofocus 12:1. Las imágenes obtenidas se captura en una computadora y puede analizarse cuidadosamente para ayudar a interpretar el contexto arqueológico.
Fig 4: La imagen de una ancla de hierro capturada con la cámara de ROV perteneciente probablemente al San Rafael naufragado a seis millas náutica de Isla de Lobos. La tecnología ROV y el DGPS contribuirán a los estudios sobre naufragios y hoy día se presentan como los medios para superar las insuficiencias técnicas existentes para la arqueología subacuática de la Isla de la Lobos. ConclusiónLa utilización de nueva tecnología nos acerca a una perspectiva regional. La meta es elucidar la relación dinámica efectuada por las naves históricas en la región bajo el estudio. Isla de Lobos ofrece un estudio del caso pertinente porque el registro de naves naufragadas es significativo. Ofrece un ejemplo de área continuamente ocupada con una sucesión estratigráfica definible porque su situación geográfica fue rica en conexiones náuticas regionales. El desarrollo de esta tecnología ha hecho disponible un rango de equipo que, en muchas circunstancias, puede volver a la investigación arqueológica más eficaz y segura. El uso de ROV puede realizar muchas de las tareas de un buzo, incluyendo búsquedas visuales y fotográficas. Pero es muy importante aclarar que toda la tecnología utilizada en arqueología marina, no puede reemplazar toda la metodología necesaria y es solo complementaria Director scientifico del proyecto arqueología subacuática Isla de Lobos BibliografíaArnold III. 1981 Remote sensing in underwater archaeology. International Journal of Nautical Archaeology 10:51-62. Nasti, A. 1999. Proyecto de Rescate del navíoGanges. Isla de Lobos. Punta del Este, Uruguay. (manuscrito) Tarlton, K. 1983 Electronic Navigation and Search techniques. In Jeffrey W. And Amess J (eds), Proceedings of the Second Southern Hemisphere Conference on Maritime Archaeology. |



 Atrás a Nordic Underwater Archaeology
Atrás a Nordic Underwater Archaeology