Project developmentI simply write in chronological order what has happened. The second photo shows the project status in January 1997. This equipment was built by me and my friends in 1996. The first summer was spent for experimenting and tuning.
short fish, summer 2000
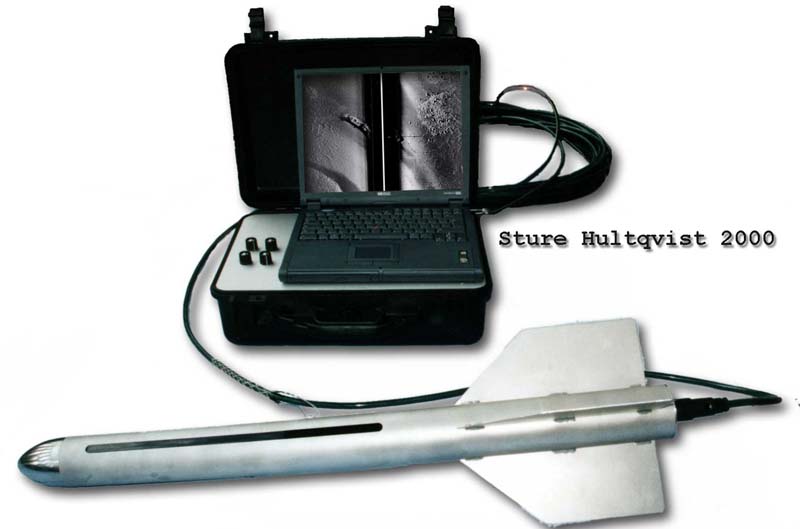
fish and terminal, 2000 The summer season '97 gave me lots of experience. By August of that year the sonar had been running for more than 500 nautical miles. The result was some nice pictures and new wrecks. Compared to a commercial machine I felt that my machine was more difficult to use since I had to tune it manually each time I used it. But I also notice that when I get everything right, it works very nice. However there is more to do to improve the resolution. The damages are limited to a cable connector and a transmitter thyristor. Since the picture from January '97 the towfish has been rebuilt to allow adjustment of the transducer down tilting angle. A new heavy nose is also made to improve the balance. There is no wobbling at slow speed anymore. The electrical noise is still too high but it has been located to the DAC buffer amps. New amps are planned to the winter break. A new trigger mechanism is also planned for.
long fish, 1997-99 The Windows program is working but it is still too slow compared to the DOS variant. I will continue to write for DOS and include a GPS interface and improve the user interface. For the moment it is almost only I who can understand how to use the program. My friend with the WESMAR 500SS has tested his machine several times now and it seems to work well. The first presentable image is the "Femöre". December 1997: Finally a full scale dual frequency transducer is ready. Without any matching the first test was done by simply replace the EG&G transducer on the right side of the towfish. Transducer test images. September 1998: During the summer I realised that I have to build a new machine to take care of the experiences from running the current one. The improvements will be in these areas:
In 1999 the system was tested around the island of Ouissant, France, invited by Alain Launay, Archisub. During spring 2000, new sonars are being developed, in a light compact single-frequency model (first photo). Sture Hultqvist, Uppsala, Sweden |