|
|
|
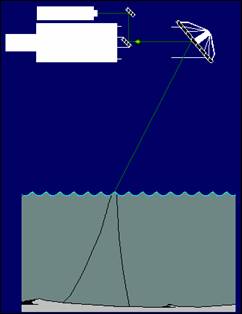
•The HawkEye system works with a 200Hz laser.
|
|
•The laserbeam is transmitted through a mirror
system to the scanning mirror which sends the pulses down to the
watersurface.
|
|
•The laserpulse contains of 80%IR and 20%green
light. The IR component of the pulse is reflected in the watersurface back to
the helicopter. The green light penetrates the watervolume and is reflected
at the bottom.
|
|
•There are three detectors for the returning
pulses, one for the IR and two for the green light. The reflected pulses are
digitized and the time between the IR and the green pulse is measured. With
that time the depth can be determined.
|
|
•The scannermirror has encoders witch gives very
accurate angles for the beam. These angels are used to calculate the position
of the lasershots relative to the helicopter. In order to stabilize the
mirror for helicopter motions the is an IRS system connected to the mirror.
|
|
•The helicopter it self is positioned with DGPS.
We have two possibilities to get differential corrections. One is through our
IALA standard radiobeacons and our other possibility is through the national
EPOS service. The EPOS service is transmitted on the FM band.
|